Engineers at MIT, in collaboration with the École Polytechnique Fédérale de Lausanne (EPFL) and the University of Cincinnati, have developed a new soft magnetic hydrogel that can be 3D printed into complex microscopic structures responsive to magnetic fields. This advancement, detailed in the journal Matter, paves the way for microscopic “magno-bots” capable of performing sophisticated maneuvers under magnetic control.
New fabrication method for magnetic microstructures
The research team addressed challenges in printing deformable, magnetic microstructures by combining two-photon lithography with a novel double-dip coating process. First, they print a microscopic polymer gel structure without magnetic particles. Then, the structure is sequentially dipped into iron ion and hydroxide ion solutions, which react within the gel to form iron-oxide nanoparticles that confer magnetic properties.
This approach overcomes conventional limitations where magnetic particles interfere with laser-based 3D printing, allowing fine control over magnetic particle distribution within different regions of a structure. By adjusting the laser power during printing, the researchers control the gel’s cross-link density and, consequently, the number of magnetic nanoparticles that can form in each area.
Demonstrations of magnetically driven microscale devices
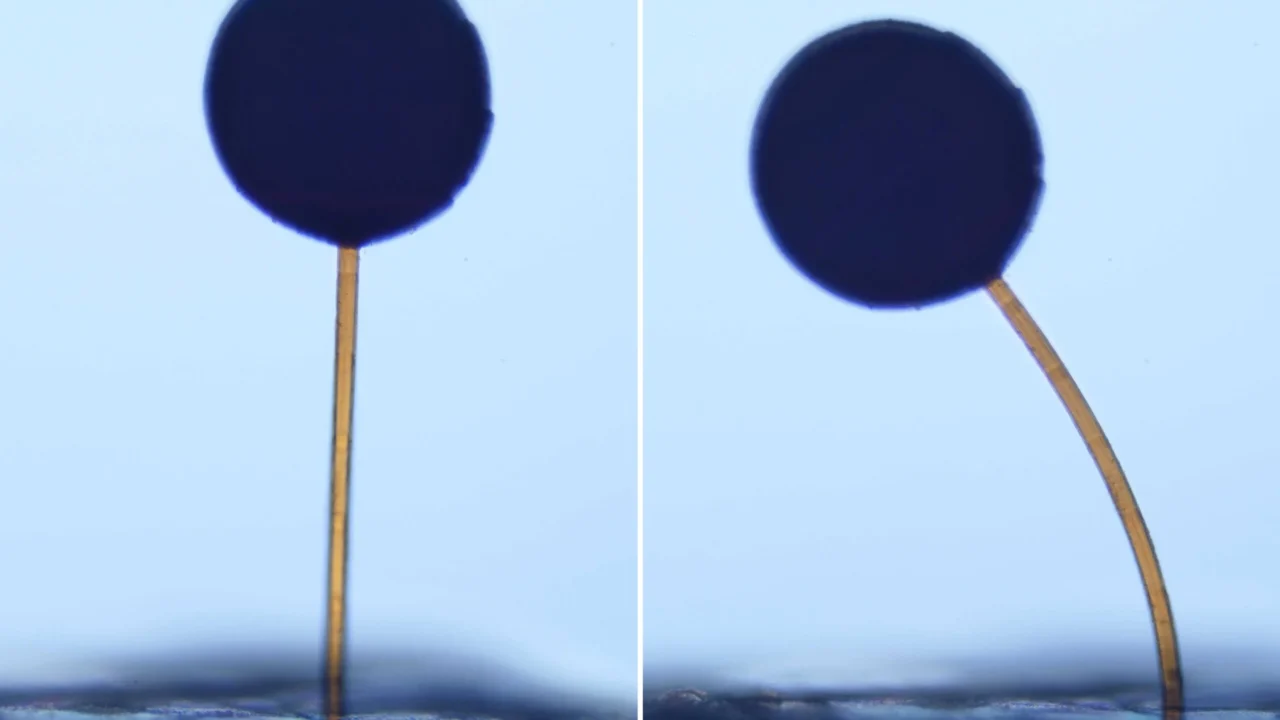
The team demonstrated their technology through several microscale devices. One example involved printing tiny “lollipop”-shaped structures less than a millimeter tall, each with spheres infused with varying levels of magnetic particles. When exposed to an external magnet, these structures acted like robotic grippers, snapping shut similarly to a Venus flytrap’s jaws.
Another demonstration involved a bistable magnetic switch composed of a millimeter-long polymer rectangle with four tiny magnetic oar-like extensions. Applying a magnet from either side caused the oars to flip and pull the rectangle into different locked positions, illustrating a potential application as a microfluidic magnetic valve.
Why it matters
The ability to fabricate soft, intricately shaped microrobots with remotely controllable magnetic features offers significant prospects in biomedical applications. These tiny robots could be guided inside the human body by external magnets to perform delicate tasks such as targeted drug delivery or biopsy sampling without invasive procedures.
Moreover, the instantaneous and remote control afforded by magnetic stimuli allows more precise and rapid operations than chemical or light-based methods, which often have slower responses or require direct contact.
Background
Previous micro-robots using magnetic materials primarily relied on mixing magnetic particles into resins before printing, limiting structural complexity and precision due to light scattering effects from metal particles. Additionally, most micro-swimmers designed to navigate narrow spaces were driven by pulling the entire magnetic body toward external magnets rather than enabling complex deformation and localized movements.
This study builds on MIT’s broader efforts in developing programmable metamaterials, which are engineered microscopic architectures that change their properties in response to external stimuli like light, chemicals, or magnetic fields.
The research was funded in part by the National Science Foundation and the MathWorks seed grant program and conducted using MIT.nano fabrication facilities.
Read more Science & Technology stories on Goka World News.
Sources
This article is based on reporting and publicly available information from the following source: